6. Точки контроля. Установка порогов.
Содержание
6.1. Главным требованием к выбору точек контроля вибрации и температуры узлов контролируемых механизмов является идентичность точек, а для вибрации и направлений измерения идентичных механизмов, что позволяет проводить сравнение результатов измерений и строить пороговые значения «по группе» обычно от 10 одинаковых объектов контроля (свои групповые пороги для каждой точки и направления контроля). Для механизмов, не имеющих «группы», пороговые значения строятся «по истории» после накопления данных периодических измерений за время или около 10% от типового ресурса или, что встречается чаще, не менее чем за 1000 часов наработки.
6.2. Основные точки контроля вибрации механизмов простейшей системой мониторинга выбираются в соответствии с действующими стандартами ИСО по направлению «Мониторинг состояния и диагностика машин», на корпусе опор вращения. Основными точками контроля температуры узлов машин также являются неподвижные поверхности узлов вращения.
6.3. Вибрация в основных точках контроля, в соответствии с рекомендациями действующих стандартов по контролю вибрации машин и механизмов, должна измеряться в трех взаимно – перпендикулярных направлениях, в частности, для механизмов горизонтального исполнения – вертикальном, горизонтальном и осевом, как это показано на рис. 6.1. Учет направления измерения, по крайней мере, низкочастотной вибрации, часто позволяет получить дополнительную информацию для идентификации состояния механизма. Вибрацию на средних и высоких частотах для контроля состояния механизмов с горизонтально расположенным ротором обычно достаточно измерять в вертикальном направлении (в направлении действия статической нагрузки на опоры вращения).
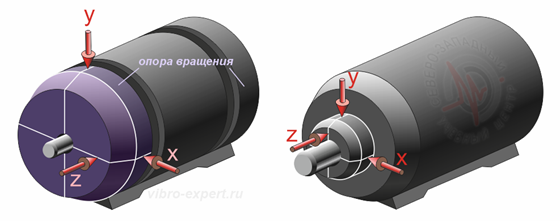
X – горизонтальное, Y– вертикальное, Z – осевое.
Рис.6.1 – Рекомендуемые направления измерения вибрации на опорах вращения механизмов
6.4. Важным вопросом является стандартизация обозначений точек контроля вибрации. Стандарты измерения вибрации на опорах вращения механизмов предлагают следовать рекомендациям, отображенным на рис 6.2, т.е. начинать нумерацию точек контроля с внешнего подшипника двигателя.
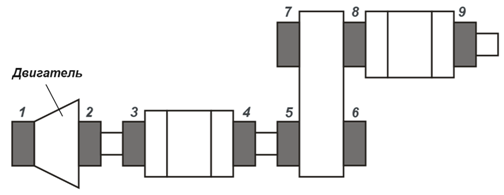
Рис.6.2 – Рекомендуемые основные точки контроля вибрации механизмов.
6.5. В некоторых случаях для получения дополнительной информации рекомендуется использовать дополнительные точки контроля вибрации механизмов. Прежде всего, это та точка на внешней поверхности корпуса потокопреобразующих механизмов (насосов, турбин и т.п.), где скорость потока максимальна. Измерения высокочастотной вибрации в такой точке позволяют выявить проблемы с формированием потока жидкости (газа), а сравнение результатов этих измерений с результатами аналогичных измерений на подшипниковых узлах – разделить неисправности подшипников и рабочих колес.
6.6. Еще одна группа дополнительных точек контроля вибрации используется для измерения вибрации на корпусе некоторых машин в направлении вращения ротора (низкочастотной тангенциальной вибрации), вызванной пульсирующими составляющими крутящего момента, встречно действующими на вращающиеся части и корпус. Точки контроля такой вибрации должны иметь касательное к корпусу направление и быть максимально удалены от оси вращения и точек крепления механизма к фундаменту, как это показано на рис 6.3. Наиболее эффективные результаты измерение тангенциальной вибрации дает в случае упругого (на виброизоляторах) крепления агрегата к фундаменту.
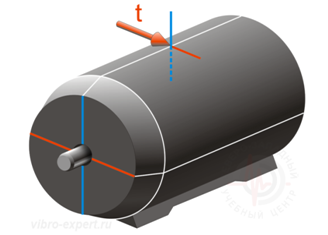
Рис 6.3 – Рекомендуемые точки контроля низкочастотной тангенциальной вибрации механизмов.
Тангенциальная вибрация в дополнительных точках контроля чаще всего измеряется у электрических машин, двигателей внутреннего сгорания, а также других типов механизмов с различной комбинацией вращающихся узлов и узлов возвратно – поступательного действия.
6.7. Основными точками контроля температуры также являются внешние поверхности опор вращения механизмов. В качестве дополнительных точек контроля температуры чаще других измеряется температура доступных для измерения бесконтактными средствами вращающихся узлов, в частности роторов электрической машины и соединительных муфт, элементов электрических цепей (под нагрузкой), а также каналов охлаждения и смазки.
6.8. Все пороги на значения измеряемых параметров вибрации и температуры, разделяющие множества состояний объекта контроля, отсчитываются от «базовой линии», проходящей по статистическому среднему, полученному по результатам периодических измерений значений этого параметра бездефектного объекта, см. рис 6.4.
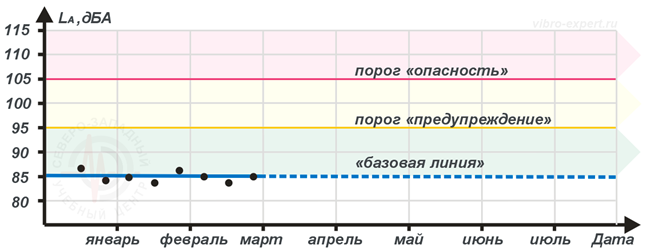
Рис. 6.4 – Установка порогов относительно базовой линии.
При определении «базовой линии» значений уровня вибрации в стандартной полосе частот (общего уровня) и температуры используются линейные единицы (мм/с или мкм для общего уровня низкочастотной вибрации, oС для температуры), для составляющих третьоктавного спектра виброускорения - логарифмические единицы (дБА). Базовая линия для СКЗ и Пик ультразвуковой вибрации может строиться по результатам измерений как в линейных единицах ( м/c2 или g, в логарифмическом масштабе), так и в логарифмических единицах (дБА, в линейном масштабе).
6.9. Как правило, базовая линия для каждого параметра определяется по его периодическим измерениям в номинальном режиме работы механизма за длительное время, в течение которого выполняется несколько остановок на его периодическое обслуживание. В однорежимных механизмах необходим хотя бы качественный контроль режима (контроль выхода механизма на установившийся режим работы). Для многорежимных механизмов контроль должен быть количественным (по частоте вращения и, если необходимо, по нагрузке). Большой статистический разброс данных при построении базовой линии контролируемого параметра указывает на неэффективность используемого параметра для контроля состояния или на необходимость более точного контроля режима работы механизма.
6.10. Наличие статистически значимого наклона у базовой линии (или на ее статистически значимом отрезке) указывает на происходящее изменение состояния в процессе приработки (спад) или развития дефекта (подъем). В первом случае требуется уточнение базовой линии после статистически значимой стабилизации результатов измерений, во втором возможен прогноз остаточного ресурса (до достижения порога «опасно», отсчитываемого от базового значения, определяемого в начале наклона базовой линии).
6.11. Аналог «базовой линии» в виде статистического среднего значения контролируемого параметра (базовое значение) может использоваться и для установки порогов по значимой (обычно от 10) группе идентичных механизмов. Особенностью такого построения среднего по группе значения является возможность попадания в используемую группу механизмов с разной наработкой и, в том числе, с развивающимися дефектами. Чтобы свести к минимуму влияние таких механизмов на результаты оценки среднего значения по группе бездефектных механизмов рекомендуется проводить дополнительную оценку полученных результатов (см. приложение В).
6.12. В настоящее время стандартные пороги по вибрационному контролю состояния механизмов определены только для общего уровня низкочастотной вибрации. Существуют и общепринятые рекомендации по установке порогов состояния по температуре узлов или по параметрам вибрации, отсчитываемых от базовой линии (по истории) или от ее аналога (по группе механизмов). Однако такие рекомендации могут быть использованы только на начальный период эксплуатации простейшей системы мониторинга. В дальнейшем эти пороги должны уточняться для каждого вида механизмов.
6.13. Всего на значение каждого вибрационного параметра рекомендуется устанавливать до 4 порогов:
-
нижний порог, определяемый нижнюю границу зоны допустимых значений контролируемого параметра работающего механизма,
-
порог «предупреждение», определяющий верхнюю границу зоны допустимых значений контролируемого параметра работающего без ограничений механизма,
-
порог «опасность», определяющий верхнюю зону кратковременно допустимых значений параметра на время принятия решений.
-
порог «останов», превышение которого требует срочной остановки механизма.
Во многих случаях для наиболее важных из контролируемых параметров два последних порога объединяются в один.
6.14. В качестве порогов на отдельные составляющие третьоктавного спектра вибрации (при принятии решений по группе механизмов) можно использовать типовые рекомендации по установке порогов «предупреждение» (+10дБ) и «опасность» (+20дБ) над статистическим средним значением.
6.15. При принятии решений о состоянии по превышению значений параметра над базовой линией следует учесть существенно меньший разброс результатов периодических измерений параметров одного механизма по сравнению с группой механизмов, особенно у низкочастотных составляющих спектра вибрации. Соответственно, рекомендуемые пороги мониторинга состояния «по истории» зависят от частоты составляющей спектра и определяются данными следующей таблицы 6.1. (данные приводятся в дБ и могут быть округлены, как правило, до 1дБ).
Таблица 6.1. Пороги состояния по составляющим третьоктавных фильтров
|
Полоса, Гц
|
полосы
2,0– 100 Гц
|
125
|
160
|
200
|
250
|
315
|
400
|
500
|
630
|
800
|
|
Предупреждение, дБ
|
5
|
5,25
|
5,5
|
5,75
|
6
|
6,25
|
6,5
|
6,75
|
7
|
7,25
|
|
Опасность, дБ
|
10
|
10,5
|
11
|
11,5
|
12
|
12,5
|
13
|
13,5
|
14
|
14,5
|
Продолжение таблицы 6.1.
|
Полоса, кГц
|
1
|
1,25
|
1,6
|
2
|
2,5
|
3,2
|
4
|
5
|
6,3
|
8
|
10 и выше
|
|
Предупреждение, дБ
|
7,5
|
7,75
|
8
|
8,25
|
8,5
|
8,75
|
9
|
9,25
|
9,5
|
9,75
|
10
|
|
Опасность, дБ
|
15
|
15,5
|
16
|
16,5
|
17
|
17,5
|
18
|
18,5
|
19
|
19,5
|
20
|
В таблице приведены рекомендуемые превышения для порогов «предупреждение» и «опасность» над базовой линией.
6.16. При определении состояния механизма по росту СКЗ и Пик ультразвуковой вибрации пороги на СКЗ и на Пик определяются от базовой линии (базового уровня при построении порогов по группе механизмов) для СКЗ и составляют соответственно 10 и 20 дБ для порога «предупреждение», а также 20 и 30дБ для порога «опасно». При контроле среднегеометрической величины от СКЗ и Пик обычно сохраняются те же пороги, которые действуют и для СКЗ.
6.17. По мере накопления данных по ложным тревогам (преждевременным выводам объектов контроля в обслуживание или ремонт), пропускам опасных ситуаций и результатам независимой дефектации объектов, поступающих в ремонт (по результатам мониторинга состояния), пороги в системе мониторинга могут корректироваться как в большую, так и в меньшую сторону. После накопления практического опыта можно определять и пороги срочного «останова» механизмов в предаварийном состоянии. До момента определения этих порогов рекомендуется пользоваться порогом «опасность» для ускоренного вывода механизма в текущий ремонт.
6.18. При принятии решений о состоянии по росту температуры узлов механизма устанавливать любые пороги рекомендуется только после построения базовой линии и оценки СКО полученных результатов. Устанавливаемый порог «предупреждение» над базовым значением не должен быть менее 3 СКО, а порог «опасность» - 6 СКО. При малых СКО температуры подшипниковых узлов (менее 1 oC) можно рекомендовать увеличение порога «предупреждение» до +5 oC, а порога «опасность» до +10 oC над базовым значением.
Для повышения эффективности тепловых методов контроля состояния желательно контролировать температуру узлов механизма после установления теплового равновесия с окружающей средой и анализировать тренды развития разности температур контролируемого узла и предварительно выбранной «реперной» точки.
Содержание






