14. Адаптация системы вибромониторинга и оперативной диагностики к агрегатам с регулируемым асинхронным приводом
В агрегатах с сильной зависимостью вибрации и/или силового тока от частоты вращения, нагрузки и других условий работы мониторинг состояния и диагностика должны проводиться в каждом из типовых режимов работы независимо. Для этого должны быть предусмотрены способы идентификации текущих режимов, т.е. установлены датчики частоты вращения и/или тока. Если в системе используются эти датчики, именно по частоте вращения определяется текущий режим и его стабильность, и выделяется несколько наиболее часто используемых диапазонов частот вращения для независимого контроля состояния и диагностики. Ширина такого диапазона, как правило, не должна превышать 10-15% от среднего значения, что сохраняет эффективность использования при мониторинге состояния результатов измерения широкополосных (третьоктавных) спектров вибрации.
В агрегатах с небольшим количеством (до трех) режимов работы с разной, но фиксированной частотой вращения, определять режим система может по измерениям вибрации, оценивая по спектру текущую частоту вращения и проводя раздельный для каждого режима мониторинг состояния, как по вибрации, так и по току.
Наибольшие проблемы в диагностике возникают при эксплуатации агрегатов с регулируемым электроприводом переменного тока. И дело не в том, что сложно определить текущую частоту вращения агрегата и ее стабильность – эта задача решается путем спектрального анализа непрерывно измеряемого силового тока, а необходимая ее корректировка на величину скольжения асинхронного двигателя проводится по данным анализа текущего спектра вибрации агрегата. Гораздо больше проблем возникает при мониторинге состояния и диагностике агрегата по высокочастотным составляющим вибрации, и по высокочастотным компонентам тока, которые существенно растут при питании двигателя от преобразователей с широтно-импульсным регулированием выходного напряжения.
Причиной такого роста являются большие импульсные напряжения на выходе статического преобразователя и заметные импульсные токи в двигателе с частотами, кратными частоте коммутации тока в статическом преобразователе (рис.8). Типовая частота коммутации – 2,5кГц, на которой (с кратными гармониками) заметно растет вибрация электродвигателя, резко затрудняющая диагностику и подшипников, и зазора в электродвигателе. В этом случае система мониторинга состояния и диагностики переходит на дополнительные диагностические признаки дефектов подшипников и эксцентриситетов зазоров, сосредоточенные в автоспектре вибрации на частотах ниже частоты коммутации тока в преобразователе (рис.8)
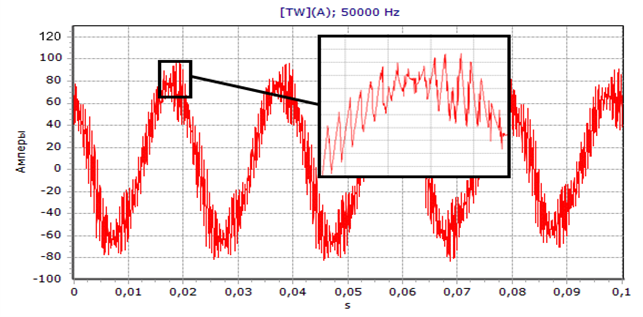
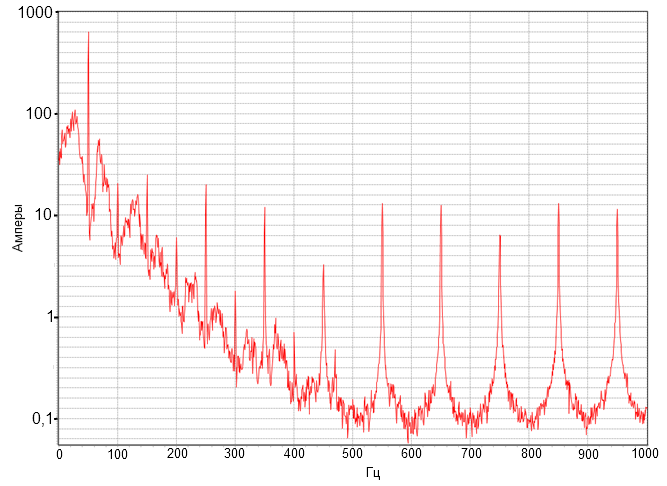
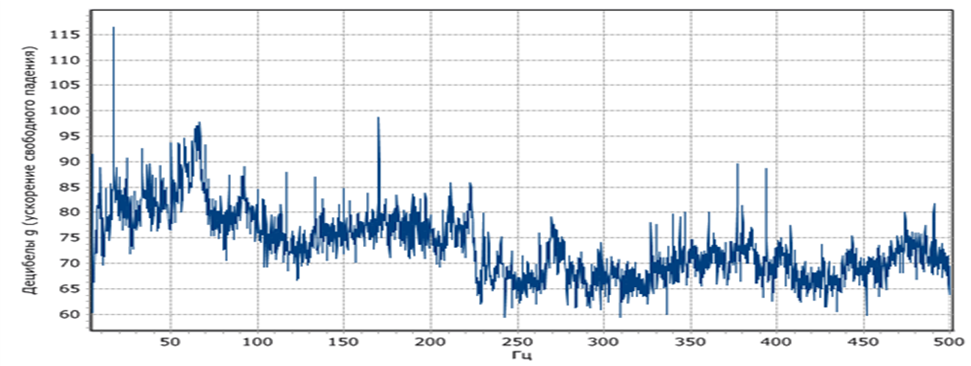
Рис 8. Типовые форма и спектр тока асинхронного электропривода при питании от статического преобразователя частоты, а также низкочастотная часть спектра вибрации электродвигателя без дополнительных составляющих из-за искажения формы тока.
Как правило, статические преобразователи используются для регулирования производительности потокосоздающих агрегатов, в частности насосов и нагнетателей. Агрегат в такой комплектации является многорежимным, и, обычно, независимо диагностируется на ограниченном количестве режимов работы. Адаптация системы диагностики к таким агрегатам проводится по тем же правилам, которые изложены ранее, но с учетом особенностей диагностирования асинхронного электродвигателя без использования высокочастотных составляющих вибрации и тока.




