В течение 1960-х годов Майкл Блейк (Michael Blake), который в то время работал на фирме Monsanto Chemical Company, опубликовал усовершенствованные графики Ратбона (Rathbone chart). Он определил пять градаций/зон состояний от АА «Опасно» до D «Без дефектов», которые отличались друг от друга на коэффициент 10 дБ (линейный множитель или делитель, равный 3,2) в частотном диапазоне от 5 Гц до 10.000 Гц в терминах перемещения, скорости и ускорения. (Необходимо отметить, что оценка изменений опасности (или глубины дефекта) (severity), при использовании постоянного множителя может привести к удивительным результатам при высоких уровнях вибрации, когда абсолютные уровни должны рассматриваться как дополнение к изменению.) Были введены Сервис-Факторы для определения категорий состояний для различных типов машин. Графики Блейка (“Blake Chart”) были основаны на критерии постоянной скорости от, примерно, 20 Гц до 1.000 Гц и снизили допустимую скорость для данной степени опасности, как для низкочастотных, так и для высокочастотных экстремумов. Этот подход применялся для зон состояний как для ускорения, так и для перемещения, и подтверждал заключение Ратбона о том, что рассмотрение сил смещает акцент к перемещению при снижении частоты и к ускорению при увеличении частоты. Предложив постоянство скорости в терминах амплитуды перемещения в функции частоты, Блейк удовлетворил босса Дильберта, который не мог освободиться от мысли, что скорость является главной мерой технического состояния. Сила, зависимость от частоты и концепция сервис-факторов являются исключительно важными принципами, которые формируют большинство основ успеха современной базы оценки состояния по сигналу вибрации. Полные графики Блейка (Blake chart) представлены в книге, написанной Рональдом Ешлеманом (Ronald Eshleman), «Основы вибрации машин» (Ronald Eshleman, Basic Machinery Vibrations, VI Press Inc., Clarendon Hills, IL, ISBN 0-9669500-0-3).
Для развития методов измерения и применения вибрации и методов диагностики Майкл Блейк в 1972 году организовал Институт Вибрации. Великолепными усилиями доктора Рона Ешлемана Институт Вибрации превратился в главное место знаний о методах оценки и диагностики технического состояния на сегодняшний день.
В 1964 году фирма IRD опубликовала и обеспечила авторские права на график вибрационной опасности в качестве справочника для оценки технического состояния машин. График IRD был основан на уровнях фильтрованной вибрации, измеренной на корпусе машины датчиком скорости. IRD использовала критерий постоянной скорости от 100 до 100.000 циклов в минуту, выраженных в функции пиковых значений перемещения от частоты. Линии постоянной скорости выделяли 9 категорий состояний от Исключительно плавной (Extremely Smooth) до Очень сильной (Very Rough). По некоторой причине, утраченной за давностью, критерии по скорости были выражены по трем важным цифрам в виде множителей 2 выше или ниже 0,1 p (0,314 дюйма в секунду) в отличие от множителя 3, использованного Блейком. Три значащие цифры позволяют полагать, что оценка опасности была гораздо более требовательной, чем необходимо в действительности.
Хотя критерий IRD по вибрации корпуса хорошо работал для большинства оборудования того времени, он мог привести к неправильным выводам для некоторых машин, особенно в случаях высокооборотных турбомашин при выводе их в ремонт. Обобщенный критерий опасности, основанный на виброскорости корпуса, был особенно бесполезен при применении к компрессорам высокого давления с тяжелыми, жесткими корпусами, легкими роторами (с большим соотношением весов корпуса и ротора), оснащенных подшипниками скольжения. Внутренности такого оборудования напоминали плохо обработанную деталь токарного станка еще до того как внешняя вибрация достигала уровня «слегка повышенная». Как отмечалось выше, единственным методом точной оценки технического состояния в этом случае являются измерения относительного перемещения вала неконтактным датчиком перемещения. (Рис. 14)
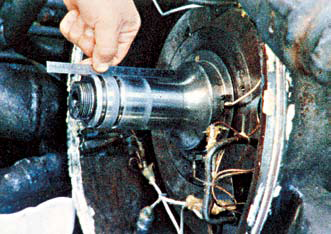
Рис. 14. Установка датчика виброперемецения на центробежном компрессоре высокого давления, 1975 г.
Несмотря на то, что графики как Блейка, так и IRD определяли пиковое значение вибрации как параметр, определяющий техническое состояние и откладываемый по оси абсцисс, сторонние сейсмические измерения, проводимые виброизмерителями общего применения в то время в США на самом деле измеряли среднюю амплитуду, умноженную на 1,57 и обозначали ее как измеренное пиковое значение. Это противоречие между терминологией и действительными измерениями оказалось очень деструктивным, и мы к нему вернемся более детально позже.
Для измерения абсолютной вибрации вала использовались вилкообразные палочки, сделанные обычно из пропитанного смазочным маслом дерева, и соединенные с датчиком скорости. Для оценки состояния больших машин, типичным примером которых являются турбогенераторы, характеризующиеся большой разницей в жесткости между подшипниками, необходимым параметром была признана абсолютная вибрация вала. Это привело к тому, что для постоянного мониторинга и защиты устанавливались стационарные скользящие по валу (контактные) подпружиненные датчики (гусарики) (Рис. 15). Гусарики широко применялись на больших паровых турбогенераторах и некоторых газовых турбогенераторах. И хотя эти системы существуют по сей день, гусарики были склонны к отклонению от вала на завышенную амплитуду, поэтому часто не показывали истинное движение и состояние. (Автор тщетно вспоминает ползание в пространстве вокруг выхлопного патрубка газовой турбины при ее запуске для определения является ли чрезмерная вибрация, замеренная на валу системой с гусариками, истинной или нет. И она была действительно истинной). Большинство гусариков были заменены комбинацией двух бесконтактных датчиков перемещения на валу и на корпусе. (Рис. 16) Абсолютная вибрация вала рассчитывалась из комбинации этих двух сигналов электронными схемами.

Рис. 15. Подпружиненный датчик вибрации перемещения вала.

Рис. 16. Двойной, неконтактный и сейсмический датчик на корпусе парового турбогенератора.
В этот же период Бюро кораблестроения США (US Navy Bureau of Ships) разработало стандарт Mil-STD 167, определяющий вибрацию крышки подшипникового щита и вала. В связи с тем, что этот стандарт должен был быть использован на подводных лодках, где вибрация и результирующий шум были самыми желанными для всех, притаившихся в глубине, чтобы слушать свои жертвы, пределы этих параметров были существенно ниже тех, которые были приняты в коммерческом окружении.
В 1970х годах были введены дополнительные стандарты. Дрессер Кларк (Dresser Clark) опубликовал широко использованный стандарт по виброперемещению валов (Рис. 17), который содержал теперь хорошо известное снижение допустимых значений амплитуд перемещений с частотой для данных условий. В 1972 году Американская ассоциация производителей зубчатых передач (American Gear Manufacturers Association (AGMA)) выпустила стандарт на приемку редукторов, который включал в себя постоянное ускорение на частотах, превышающих 1.000 Гц, как у Блейка.
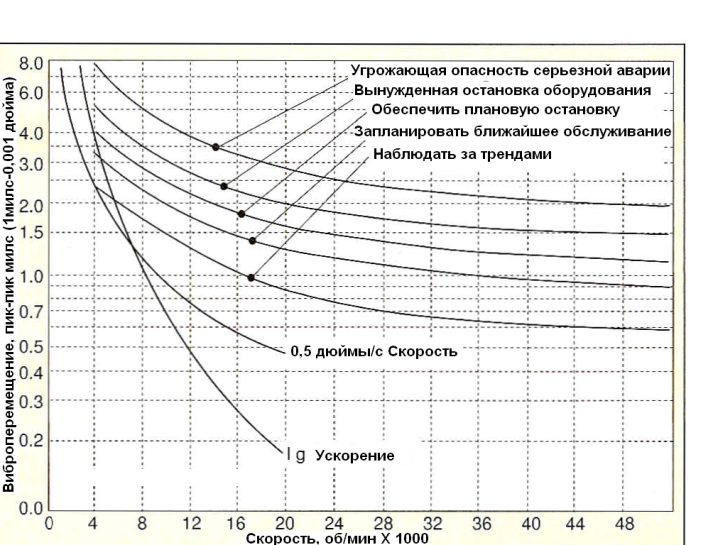
Рис. 17. График Дрессера по оценке опасности виброперемещения
В этот же период времени Американский институт нефти (American Petroleum Institute (API), ведомый стратегами Чарли Джексоном (Charlie Jackson), Муррей Ростом (Murray Rost (Mobile), и Диком Дубнером (Dick Dubner (Chevron)), разработал ряд технических требований по конструированию машин, с минимальным допускам на критические скорости, допустимую вибрацию, качество балансировки и чувствительность к дисбалансу ротора. Все они были основаны на твердо усвоенных уроках по динамике и стабильности роторов, которые мы обсудили выше. Они оказались очень успешными при усовершенствовании конструкции и надежности эксплуатации и стали величайшим наследием этих выдающихся специалистов.
В 1974 году Международная организация по стандартизации (ИСО) опубликовала следующие стандарты:
-
ISO 2372 Вибрация машин со скоростями вращения от 10 до 200 об/сек – Основные положения по требованиям стандартов для оценки состояния (основанный на немецком стандарте VDI 2056)
-
ISO 3945. Измерения и оценка опасности вибрации больших машин на месте их работы. Скорости вращения от 10 до 200 об/сек.
С тех пор ISO 2372 существенно расширился до Стандарта ISO 10816 Вибрация. Контроль состояния машин по результатам измерений вибрации на невращающихся частях (около 8 частей). Эти стандарты устанавливали постоянство скорости, т.к. ИСО контролирует и оценивает опасность по измерениям вибрации корпуса машины. Эти стандарты определяли как методы расчетов СКЗ, так и полосу частот (от 10 до 1.000 Гц). Они также устанавливали 4 класса машин с различными критериями опасности для каждого класса. С точки зрения США Ед Нунан из опытного бассейна Давида Тейлора (Ed Noonan of the David Taylor Model Basin) был тем, кто направлял попытки основать ISO 2372, 3945 и 7919 Вибрация. Контроль состояния машин без возвратно-поступательного движения - Часть 2. Измерения и оценка вибрации вала больших систем турбина/генератор (еще 6 или 7 частей). Необходимо также отметить основной вклад Поля Маедала и Стюарда Максвелла (Paul Maedel и Steward Maxwell), основателя Канадской ассоциации вибрации машин (Canadian Machinery Vibration Association), в разработку стандартов ИСО 7919 и ИСО 10816.
Как было отмечено ранее, использование СКЗ в стандартах ИСО для измерений вибрации на корпусе было основным отличием от практики производителей приборов США, которые использовали пиковые значения вибрации, рассчитываемые как среднее значение амплитуды, умноженной на коэффициент 1,57. И хотя измерение СКЗ амплитуд и средних значений амплитуд, умноженных на постоянное число, более-менее эквивалентны с точки зрения влияния на них дефектов, разница в терминологии и различия в амплитудах для определенного уровня опасности (глубины развития дефекта) приводят к недоразумениям и основным противоречиям, не нашедшим своего разрешения по сей день.
Общий уровень виброскорости, измеренной без фильтра, будет идентичен для машины, вращающейся преимущественно на частоте вращения, действительное пиковое значение будет намного выше, чем СКЗ, умноженное на постоянный коэффициент, для машин, возбуждающих высокие частоты (с высоким крест-фактором), таких как зубчатые зацепления и подшипники качения с дефектами. Исследования, проведенные Джеком Фререем (Jack Frarey), работавшем в Electric Power Research Institute (EPRI) Eddystone, PA M&D Center, показали, что ранее разработанные цифровые приборы, использовавшие детектор СКЗ для ускорения на высоких частотах, были не столь чувствительны к дефектам подшипников, как приборы, использовавшие пиковые значения, хотя разница была для пользователей непонятна.
История достаточно интересная и вызывала много путаницы во время перехода к цифровым приборам. Детально она описана в статье, опубликованной в Институте вибрации в декабрьском выпуске 1987 года в журнале Вибрация (том 3, номера 3/4) (Vibrations (Vol.3 Numbers 3/4)).
Стандарт Американского института нефти 070, «Вибрация и системы мониторинга положения оси вала» (API Standard 070, “Vibration, and Axial-Position Monitoring Systems”) – ‘это еще один стандарт, который определил методы и практику мониторинга технического состояния. Сформулированный, в основном, прогрессивными пользователями под руководством В. Рейа Додда из фирмы Шеврон (V. Ray Dodd of Chevron) и Чарли Джексона (Charlie Jackson), API 670 был разработан как окончательный стандарт для систем мониторинга перемещения вала, обеспечивающий их надежность и стандартизацию. Стандарт устанавливал строгие требования к мониторингу перемещения вала, включая характеристики надежности системы, такие как первые индикаторы неисправности и двойную мажоритарную логику (dual voting logic) и? рабочие параметры. Стандарт включал габаритные размеры и такие мелочи как размер соединительных коробок, ориентацию измерителя, полный диапазон шкалы и ее градуировку. Хотя было много доводов за положения, включенные в стандарт (например, за действующие значения размаха по сравнению с переводом их в СКЗ) и против (из-за того, что в разработке принимали участия определенные специалисты и фирмы), они постепенно дорабатывались и к настоящему времени, в основном, стандарт определяет мониторинг линии вала и защиту. В 1975 году фирма Dymac, в настоящее время являющаяся частью фирмы SKF Condition Monitoring, выпустила первую систему мониторинга полностью совместимую со стандартом API 670. Примерно, через год или около того фирма Endevco выпустила систему полностью совместимую с API 670. К концу 1970-х годов практически все производители систем мониторинга работали совместимо со стандартом API 670.
Для учета вибрации корпусов, примерно, через 6 лет после выпуска стандарта API 670 был выпущен дополнительный стандарт API 678 «Системы мониторинга вибрации на базе акселерометра». Стандарт одобрил двухканальный (“dual path”) мониторинг, впервые предложенный фирмой Endevco в статье, опубликованной в 1976 году. Двухканальный мониторинг обеспечивал метод, который одновременно обеспечивал защиту и прогноз с помощью сигналов, получаемых от акселерометра. Двухканальный мониторинг использовал фиксированные фильтры для разделения низких частот, обычно используемых для защитного мониторинга, от высоких частот, используемых для выявления характеристик, отвечающих за прогноз. Низкочастотный диапазон, обычно проинтегрированный до скорости, использовался в соответствии с традиционной практикой оценки состояния, такого как дисбаланс и несоосность. Высокочастотный диапазон, который обычно использовал ускорение, был установлен для идентификации ненормальных состояний узлов и оборудования, таких как подшипники качения и изменения скоростей зубчатых зацеплений, которые предупреждают об отдаленных проблемах. Эта концепция, представленная в предыдущем разделе, развилась в многодиапазонный по частоте мониторинг, используемый в настоящее время цифровыми приборами.
Как уже указывалось, API 670 был очень успешным стандартом и стал основным документом для мониторинга перемещений вала практически во всех отраслях промышленности. Стандарт API 678 не был столь успешным. В ноябре 1993 года вышло третье издание API 670 «Системы мониторинга вибрации, положение оси вала и температура подшипников» (“Vibration, Axial Position, and Bearing Temperature Monitoring Systems”). Третье издание включило в себя положения стандарта API 678, касающиеся мониторинга вибрации корпусов, и стало универсальным стандартом по мониторингу, направленным скорее на эксплуатацию и надежность, чем на какое-нибудь конкретное применение. Были определены эксплуатационные характеристики, считающиеся важными для надежного внедрения цифровой техники. Большинство строгих требований к методам действий из предыдущих изданий были отменены. Четвертое издание, опубликованное вначале 2000-х годов, распространило требования на надежность систем мониторинга, разрешив более гибкое применение и большую интеграцию с системами управления производством. Функции могут быть перераспределены настолько, насколько надежность и выходной сигнал удовлетворяют требованиям. В настоящее время стандарт API 670 широко признан как производителями приборов, так и пользователями в качестве основного стандарта для систем защитного мониторинга.
В заключение рассмотрения стандартов необходимо упомянуть, что корпорация Дженерал Моторс (General Motors Corporation) опубликовала очень детальный стандарт по вибрации машин и оборудования (Vibration Standard for Machinery and Equipment) в 1997г. Этот стандарт, к настоящему времени вышло его второе издание, был насильно внедрен Джимом Пино (Jim Pyno). Этот стандарт устанавливал критерии ограничения амплитуды вибрации в частотных полосах для нескольких классов оборудования, начиная от точных станков и кончая моторами общего применения и вентиляторами. Без сомнения, на сегодняшний день это самый подробный стандарт, посвященный приемочным испытаниям по критериям, касающимся вибрации корпусов. Он был откорректирован и адаптирован многими компаниями и вне сферы автомобильной промышленности.
предыдущая 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 следующая




