12. Идентификация дефектов электромагнитной системы электрических машин.
Содержание
12.1. При контроле состояния электромагнитной системы электрических машин по вибрации и температуре с решением задачи идентификации дефектов электрические машины следует разделять на следующие типы:
-
асинхронные электродвигатели,
-
синхронные машины переменного тока
-
машины постоянного тока,
-
шаговые электродвигатели.
Во многих случаях электрические машины, используемые в качестве приводного двигателя агрегатов с регулируемой частотой вращения, питаются не напрямую от общей электрической сети, а через регулируемые статические выпрямители и преобразователи, искажающие форму выходного напряжения и значительно влияющие на вибрацию агрегата. Контроль состояния электродвигателя, да и всего агрегата в этом случае требует знания частоты питающей напряжения и частоты вращения агрегата на момент измерения вибрации, а также учета влияния формы питающего напряжения на вибрацию электродвигателя и агрегата в целом. Поэтому идентификация дефектов агрегатов со статическими преобразователями в силовых электрических цепях чаще всего выполняется профессиональными системами диагностики машин и механизмов по вибрации, току и температуре.
12.2. Основные дефекты электрических машин, влияющие на их вибрацию и температуру, как правило, делят на следующие группы:
-
дефекты механической системы ротор - подшипники,
-
дефекты электрических цепей,
-
дефекты магнитных цепей,
-
дефекты систем охлаждения и смазки.
12.3. Ниже рассматриваются возможности обнаружения и идентификации дефектов электромагнитной системы, т.е. второй и третьей из перечисленных групп. Дефекты этих групп, как правило, влияют на параметры многих составляющих сигнала вибрации на низких и средних частотах, однако мощность большинства из этих составляющих весьма мала. Причина в том, что при дефектах электромагнитной системы наиболее сильно изменяются параметры слабых составляющих электромагнитного поля на характерных частотах, и, соответственно, слабых составляющих, как вибрации, так и тока в обмотках электрических машин. Поэтому для глубокой диагностики электромагнитной системы обычно используются профессиональные средства анализа вибрации и/или тока в обмотках электрических машин, позволяющие разделить в частотной области признаки дефектов механического и электромагнитного происхождения. В то же время возможности простейшей системы мониторинга в части обнаружения изменений состояния электрических машин достаточно велики, ограничения возникают преимущественно при идентификации дефектов.
12.4. Для идентификации причин изменения состояния электрической машины с помощью простейшей системы мониторинга необходимо знание типа машины, частоты вращения ротора, частоты питающего напряжения (для машин переменного тока) и количества зубцов (полюсов) на роторе (якоре). Для машины постоянного тока нужна дополнительная информация - количество основных полюсов (в документации чаще приводится количество пар р основных полюсов) и пластин коллектора, которое обычно кратно количеству зубцов якоря. Ниже приводятся основные частоты для идентификации дефектов, доступных для обнаружения с помощью простейшей системы мониторинга раздельно по каждому виду электрических машин.
Таблица 12.1. Основные частоты электрических машин
|
Тип двигателя
|
Основные частоты
|
|
Асинхронный двигатель
|
Fвр – частота вращения ротора
F1 – частота питающего напряжения (обычно 50 Гц, 60Гц, 200 Гц)
Fz = k·Fвр·zrt±2F1 – зубцовые частоты
где k – целое число, определяющее номер гармоники зубцовой частоты,
zrt – количество зубцов ротора
|
|
Синхронная машина переменного тока
|
Fвр – частота вращения ротора
F1 – частота питающего напряжения (обычно 50 Гц, 60Гц, 200 Гц)
Fz = 1,5Fвр·zrt – зубцовая частота (неявнополюсная машина)
Fz = Fвр·zst – зубцовая частота (явнополюсная машина)
zst – количество зубцов статора
zrt – количество зубцов ротора
|
|
Машина постоянного тока
|
Fвр – частота вращения якоря
Fщ = 2рFвр – щеточная частота
Fz = Fвр·zrt – зубцовая частота
Fк = Fвр·zk - коллекторная частота
p – количество пар основных полюсов
zrt – количество зубцов якоря
zk – число пластин коллектора
|
12.5. К основным дефектам электромагнитной системы, влияющим на вибрацию питающегося синусоидальным (без искажений формы и несимметрии по фазам) напряжением асинхронного электродвигателя, относятся:
-
дефекты статора (обрывы и короткие замыкания в силовых обмотках, короткие замыкания в активном сердечнике статора),
-
обрывы в беличьей клетке и короткие замыкания в активном сердечнике ротора,
-
изменения формы зазора между ротором и статором (статический и вращающийся эксцентриситет) прежде всего из-за износа подшипников или деформации корпуса при креплении к фундаменту («мягкая лапа»).
В асинхронных электродвигателях наибольшие изменения вибрации при дефектах электромагнитной системы могут происходить на частоте вращения ротора, на четных гармониках питающего напряжения, а также на зубцовых частотах. Все другие изменения вибрации электромагнитного происхождения в асинхронных электродвигателях идентифицировать по третьоктавному спектру вибрации крайне сложно.
12.6. Кроме как из-за собственно дефектов вибрация электромагнитного происхождения в двигателях переменного тока может существенно изменяться из-за изменения свойств питающего трехфазного напряжения (несимметрии его величины по фазам или искажения формы), а также из-за перегрузки двигателя. При несимметрии напряжения растет вибрация на второй гармонике его частоты, при искажениях – на шестой, двенадцатой, а иногда на более высоких (кратных шестой) гармониках. При перегрузке двигателя с последующим частичным магнитным насыщением активного сердечника ротора и статора также растет вибрация на шестой и кратных гармониках частоты питающего напряжения. При обнаружении роста указанных составляющих вибрации асинхронного электродвигателя (и синхронного также) есть простой способ разделить возможные причины на две основные группы, связанные с изменениями состояния собственно электродвигателя и питающей его электрической сети путем контроля и сравнения вибрации нескольких агрегатов, питающихся от одной сети. При проблемах с сетью похожие изменения вибрации наблюдаются во всех электродвигателях переменного тока.
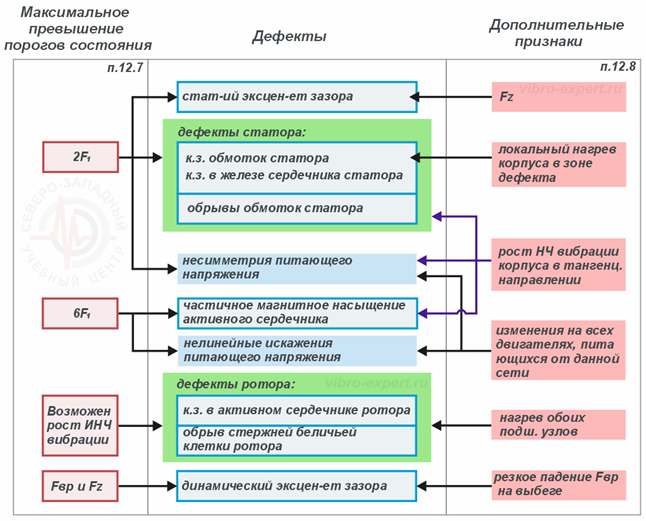
12.7. По обнаруженным изменениям указанных компонент вибрации асинхронных двигателей могут быть идентифицированы следующие группы дефектов:
-
статический эксцентриситет зазора, дефекты статора (обрывы и короткие замыкания обмоток, короткие замыкания между пластинами его активного сердечника), несимметрия напряжения питания – по росту вибрации на двойной частоте питающего напряжения,
-
динамический (вращающийся) эксцентриситет зазора – по одновременному росту вибрации на частоте вращения и на зубцовых частотах,
-
частичное магнитное насыщение активного сердечника из-за перегрузки двигателя и нелинейные искажения питающего напряжения – по росту вибрации на шестой гармонике питающего напряжения.
К сожалению, основные признаки дефектов беличьей клетки и сердечника ротора проявляющиеся в сигнале вибрации, часто недоступны для обнаружения простейшей системой мониторинга. Лишь при опасных дефектах ротора и большой нагрузке на двигатель, т.е. при значительном росте величины скольжения, один из признаков – рост инфранизкочастотной вибрации на двойной частоте скольжения по частоте превышает 2Гц и попадает в частотный диапазон системы мониторинга.
12.8. Для более подробной идентификации некоторых дефектов собственно электродвигателя можно воспользоваться следующими дополнительными признаками:
-
ростом зубцовых гармоник вибрации не только при динамическом, но и при статическом эксцентриситете зазора,
-
ростом низкочастотной вибрации электродвигателя (особенно у агрегатов, упруго закрепленных на фундаментах) преимущественно в тангенциальном направлении при дефектах статора и проблемах с питающим напряжением, а также при магнитном насыщении активного сердечника,
-
резким падением уровня вибрации двигателя на частоте вращения ротора при отключении питания (в начальной фазе выбега) при динамическом эксцентриситете зазора,
-
локальным (в зоне дефекта) нагревом корпуса двигателя при короткозамкнутых витках в обмотке или сердечнике статора и нагревом обоих подшипниковых узлов при обрыве стержней беличьей клетки или коротких замыканиях пластин сердечника ротора.
Следует особо отметить, что влияние дефектов электромагнитной системы на вибрацию машин переменного тока относительно слабо изменяется с величиной нагрузки. Идентификацию дефектов асинхронного двигателя можно проводить как в номинальном режиме, выбранном для проведения работ по мониторингу, так и в режиме холостого хода. Учитывать следует только факт снижения частоты скольжения двигателя в режиме холостого хода.
12.9. Схема алгоритма идентификации дефектов асинхронного электродвигателя по результатам измерений, выполняемых простейшей системой диагностики, приводится на рис.12.1. Как видно из приведенной схемы, дефекты обмотки и сердечника ротора двигателя не обнаруживаются по результатам контроля третьоктавного спектра вибрации электродвигателя, для решения этой задачи необходимо контролировать узкополосные спектры вибрации или потребляемого тока.
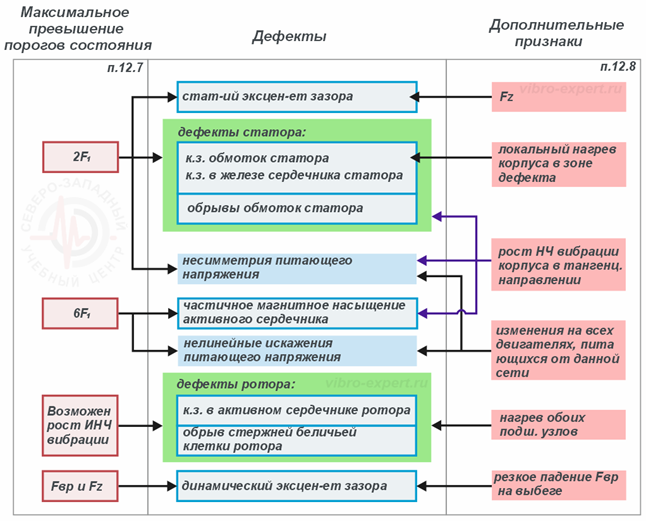
F1 – частота питающего электродвигатель напряжения,Fвр – частота вращения двигателя, Fz –– зубцовая частота двигателя, НЧ – низкочастотная вибрация, ИНЧ – инфранизкочастотная вибрация (до5Гц).
Рис.12.1 – Схема алгоритма идентификации дефектов электромагнитной системы асинхронного электродвигателя.
12.10. К основным дефектам электромагнитной системы, влияющим на вибрацию синхронной электрической машины (при питании симметричным синусоидальным напряжением в режиме двигателя или при отсутствии несимметрии и нелинейности нагрузки в режиме генератора) относятся:
-
дефекты статора (обрывы, короткие замыкания в его обмотках и в активном сердечнике),
-
дефекты ротора (обрывы и замыкания в обмотке постоянного тока, дефекты крепления полюсов),
-
изменения формы зазора между полюсами и статором (статический и вращающийся эксцентриситеты),
-
распушение активных пакетов сердечника статора крупных электрических машин.
Зазоры в синхронных машинах по величине многократно превышают зазоры в асинхронных двигателях, их эксцентриситеты в относительных единицах обычно невелики и на состояние машины влияние практически не оказывают. Исключение – статический эксцентриситет в крупных машинах, в которых статор и ротор крепятся к фундаменту независимо друг от друга.
В синхронных электрических машинах наибольшие изменения вибрации при дефектах электромагнитной системы могут происходить на частоте вращения ротора, на четных гармониках питающего напряжения и на зубцовых частотах (кратных произведению частоты вращения на 3/2 от количества зубцов ротора в неявнополюсных машинах или частоты вращения на количество зубцов статора в явнополюсных машинах). Все другие изменения параметров электромагнитной системы идентифицировать по третьоктавному спектру вибрации крайне сложно.
12.11. По обнаруженным изменениям указанных компонент вибрации синхронных электрических машин могут быть идентифицированы следующие группы дефектов:
-
статический эксцентриситет зазора, дефекты статора, несимметрия напряжения питания, распушение пакетов статора – по росту вибрации на двойной частоте питающего напряжения,
-
короткие замыкания в обмотках возбуждения и дефекты крепления полюсов ротора (вращающийся эксцентриситет зазора) – по одновременному росту вибрации на частоте вращения и на зубцовых частотах,
-
частичное магнитное насыщение активного сердечника машины и нелинейные искажения напряжения – по росту вибрации на шестой гармонике питающего напряжения.
12.12. Для более подробной идентификации некоторых дефектов синхронной электрической машины можно воспользоваться следующими дополнительными признаками:
-
ростом низкочастотной вибрации статора электрической машины (особенно у агрегатов, упруго закрепленных на фундаментах) преимущественно в тангенциальном направлении при дефектах статора, при проблемах с питающим напряжением электродвигателя или с выходным напряжением генератора из-за несимметрии или нелинейности подключаемой нагрузки, а также при магнитном насыщении активного сердечника,
-
резким падением уровня вибрации двигателя на частоте вращения ротора и зубцовой частоте при отключении питания (в начальной фазе выбега) при дефектах обмотки возбуждения или узлов крепления полюсов ротора,
-
локальным (в зоне дефекта) нагревом корпуса двигателя при короткозамкнутых витках в обмотке или сердечнике статора,
-
ростом вибрации дефектного пакета статора на двойной частоте силового тока и ее гармониках при распушении активного сердечника этого пакета (измеряется вибрация пакета, при наличии средств измерения шума возможен контроль воздушного шума в ближней к пакету зоне),
12.13. Схема алгоритма идентификации дефектов синхронного электродвигателя по результатам измерений, выполняемых простейшей системой диагностики, приводится на рис.12.2.
F1 – частота питающего электродвигатель напряжения, Fвр - частота вращения двигателя, Fz - зубцовая частота двигателя, НЧ – низкочастотная вибрация.
Рис.12.2 – Схема алгоритма идентификации дефектов электромагнитной системы синхронной электрической машины.
12.14. К основным дефектам электромагнитной системы, влияющим на вибрацию машины постоянного тока (при отсутствии переменных составляющих на выходе питающего двигатель выпрямителя или отсутствии импульсных потребителей тока при работе в режиме генератора) относятся:
-
обрывы и короткие замыкания пластин коллектора,
-
полная или частичная потеря контакта щеток с пластинами коллектора
-
обрывы и короткие замыкания в электрических цепях якоря и уравнительных соединениях,
-
несимметрия формы и величины зазора между якорем и разными полюсами (как основными, так и дополнительными),
-
короткие замыкания в обмотках возбуждения.
В машинах постоянного тока наибольшие изменения вибрации при дефектах электромагнитной системы могут происходить на частоте вращения якоря, на щеточных частотах (кратных произведению частоты вращения якоря на количество основных полюсов), а также на зубцовых и коллекторных частотах (кратных произведению частоты вращения на количество зубцов якоря и пластин коллектора). Все другие изменения параметров электромагнитной системы идентифицировать по третьоктавному спектру вибрации крайне сложно.
В большинстве практических случаев двигатели постоянного тока питаются от трехфазных выпрямителей, в выходном напряжении которых присутствуют переменные составляющие с частотами, пропорциональными частоте сети переменного тока (максимальные по величине составляющие имеют частоты, пропорциональные шестой гармонике этой сети). Возбуждаемая кратными частоте сети гармониками тока вибрация обычно ограничивает возможности диагностики машин постоянного тока с применением широкополосных виброанализаторов.
12.15. По обнаруженным изменениям указанных компонент вибрации машин постоянного тока могут быть идентифицированы следующие группы дефектов:
-
ухудшение контакта щеток с пластинами коллектора из-за износа либо щеток, либо обрыва пластины коллектора – по росту вибрации на щеточной частоте (вибрация растет преимущественно в тангенциальном направлении),
-
нарушение формы зазоров между основными и дополнительными полюсами, а также между полюсами и якорем, короткие замыкания в обмотке возбуждения – по росту вибрации на коллекторных гармониках. Причиной таких дефектов обычно является сдвиг полюсов из-за ослабления креплений, замыкания в обмотке возбуждения, а следствием – нарушение условий коммутации тока, особенно под нагрузкой,
-
дефекты якоря, в том числе уравнительных соединений, изменяющих форму поля якоря – по росту вибрации на первой и, частично, второй гармониках частоты вращения, а также по росту зубцовых гармоник вибрации.
12.16. Для более подробной идентификации некоторых дефектов электрической машины постоянного тока можно воспользоваться следующими дополнительными признаками:
-
резким падением уровня вибрации двигателя на частоте вращения якоря и щеточной частоте при отключении питания (в начальной фазе выбега) при дефектах соответственно якоря и коллектора (щеток),
-
сильной зависимостью величины вибрации на зубцовых гармониках от нагрузки (знак зависимости - любой) при дефектах обмотки якоря и обмотки возбуждения.
12.17. Схема алгоритма идентификации дефектов машины постоянного тока по результатам измерений, выполняемых простейшей системой диагностики, приводится на рис.12.3.
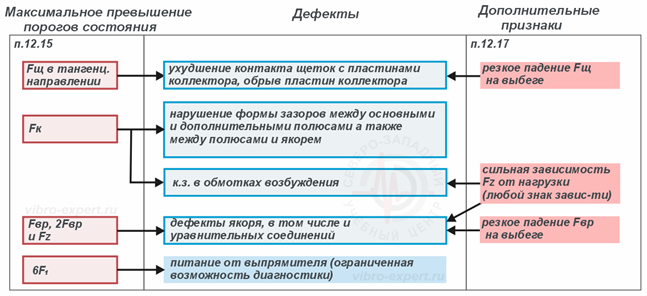
Fвр - частота вращения ротора, Fщ - щеточная частота, Fz - зубцовая частота,Fк - коллекторная частота, F1 - частота напряжения на входе выпрямителя,
Рис.12.3 - Схема алгоритма идентификации дефектов электромагнитной системы электрической машины постоянного тока.
12.18. К основным дефектам электромагнитной системы, влияющим на вибрацию шаговых двигателей переменного тока (при отсутствии несимметрии и искажений напряжения питания) относятся:
-
обрывы и короткие замыкания в силовых обмотках.
-
изменения формы зазора (статический и вращающийся эксцентриситеты).
Основные изменения вибрации из-за перечисленных дефектов могут происходить на гармониках частоты вращения двигателя, начиная с первой, а также на двойной частоте питающего напряжения. Особенностью влияния дефектов на вибрацию является модуляция вибрации на двойной частоте питания гармониками частоты вращения двигателя, которую нельзя определить по третьоктавному спектру вибрации. Поэтому шаговые электродвигатели обычно диагностируются с использованием узкополосного спектрального анализатора сигналов, чаще всего профессиональными системами диагностики по вибрации и току двигателя.
12.19. Примечание. Использование для питания электродвигателей как переменного, так и постоянного тока статических выпрямителей и преобразователей напряжения существенно усложняет процессы диагностирования электродвигателей как по вибрации, так и по току. Преобразователи старых поколений, построенные на тиристорной электронике, существенным образом искажают форму выходного напряжения, что не позволяет применять простейшую систему вибрационного мониторинга для надежной оценки состояния электродвигателей. В то же время в современных статических преобразователях с высокой частотой коммутации силового тока (выше 2 кГц) искажения формы напряжения минимальны, что позволяет идентифицировать дефекты в электрических машинах (если известна частота выходного напряжения на момент проведения измерений). Но высокочастотные (на частоте коммутации тока и ее гармониках) компоненты тока влияют на высокочастотную вибрацию электрических машин и затрудняют диагностику их подшипниковых узлов.
Для проверки возможности диагностики конкретного электродвигателя переменного тока со статическим преобразователем необходимо на практике оценить те изменения вибрации двигателя, которые вносит преобразователь. Для этого надо сравнить третьоктавные спектры вибрации опор вращения, выполненные при работе двигателя от сети предприятия и от статического преобразователя при частоте выходного напряжения, равной частоте сети предприятия.
Если обнаруженный рост составляющих третьоктавной вибрации (обычно на частоте коммутации силового тока и ее гармониках) при работе от преобразователя не превышает 40% (трех дБ), двигатель доступен для контроля состояния и идентификации дефектов при работе от статического преобразователя. Пример такого сравнения приведен на рис. 12.4.
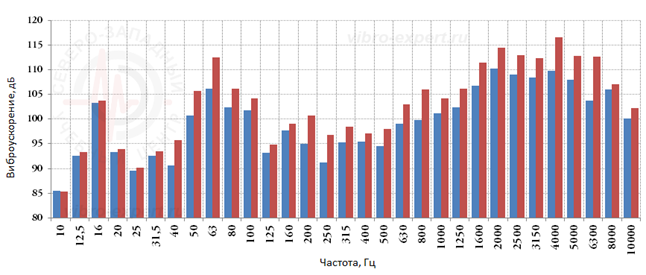
Синий цвет – вибрация подшипникового узла при питании двигателя от сети 50Гц. Красный цвет – вибрация подшипникового узла при питании от преобразователя с частотой выходного напряжения 50Гц
Рис. 12.4 – Влияние качества выходного напряжения со статического преобразователя на третьоктавные спектры вибрации асинхронного двигателя.
12.20. Примеры применения рассмотренных признаков дефектов для обнаружения и идентификации дефектов машин переменного и постоянного тока с помощью простейшей системы мониторинга приводятся в приложении Д.
Содержание






