Раздел 3.
Балансировка жесткого ротора.
Неуравновешенное твердое тело (ротор) при вращении можно характеризовать осью вращения, проходящей через опоры вращения и главной осью инерции, проходящей через центр масс. Когда эти оси не совпадают, на тело действует центробежная сила, определяемая частотой вращения и сдвигом центра масс относительно оси вращения (величиной эксцентриситета - е). Есть и еще одна характеристика неуравновешенности ротора – величина дисбаланса D = mе, равная произведению его массы на величину эксцентриситета /1/. И эксцентриситет, и дисбаланс ротора – векторные величины, они кроме значения характеризуются еще и фазой (углом поворота от выбранной метки на роторе). Ротор должен удовлетворять требованиям соответствующего класса точности балансировки, определяемого величиной произведения его удельного дисбаланса (модуля эксцентриситета) на максимальную скорость вращения /2/. Неуравновешенность ротора в составе агрегата не должна быть источником повышенной вибрации неподвижных частей опор вращения агрегата в стандартной полосе частот, основной вклад в которую формирует центробежная сила ротора.
Задача балансировки ротора на балансировочном станке - снизить удельный дисбаланс ротора до допустимой величины и подтвердить это результатами соответствующих измерений. Для этого в специальные плоскости коррекции на роторе (рис.2) устанавливаются корректирующие массы, обеспечивающие совмещение оси вращения и оси инерции ротора с доступной для решения практических задач точностью. Качество балансировки ротора на балансировочных станках оценивается по остаточному удельному дисбалансу /5-7/. Поэтому, какие бы параметры колебательных сил или вибрации в опорах вращения не измерялись, они всегда приводятся к остаточному дисбалансу ротора по каждой из опор. Определить остаточный дисбаланс ротора при балансировке в составе агрегата можно лишь в отдельных случаях, при наличии встроенных в опоры вращения датчиков относительного перемещения (проксиметров), измеряющих колебания вращающегося вала. Поэтому качество балансировки роторов на месте чаще всего определяют по вибрации неподвижных узлов агрегата на частоте вращения ротора, уровень которой должен удовлетворять соответствующим требованиям /3,4/.
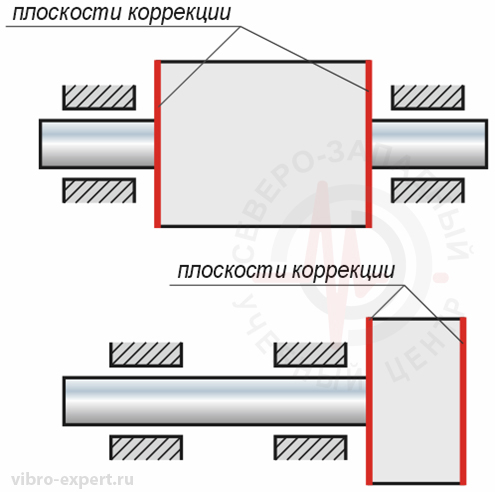
Рис. 2. Межопорный и консольный ротор с плоскостями коррекции.
Ротор может иметь два вида неуравновешенности – статическую и моментную, их сумму называют динамической неуравновешенностью (рис.3). Для учета соотношения статической и моментной неуравновешенности ротора необходимо дополнительно к вектору эксцентриситета указывать еще и величину сдвига (по оси вращения) центра дисбаланса относительно центра масс. На практике неуравновешенность жесткого ротора обычно делится на две векторные составляющие, определяемые для каждой из двух плоскостей коррекции ротора или для плоскостей, проходящих через опоры вращения.
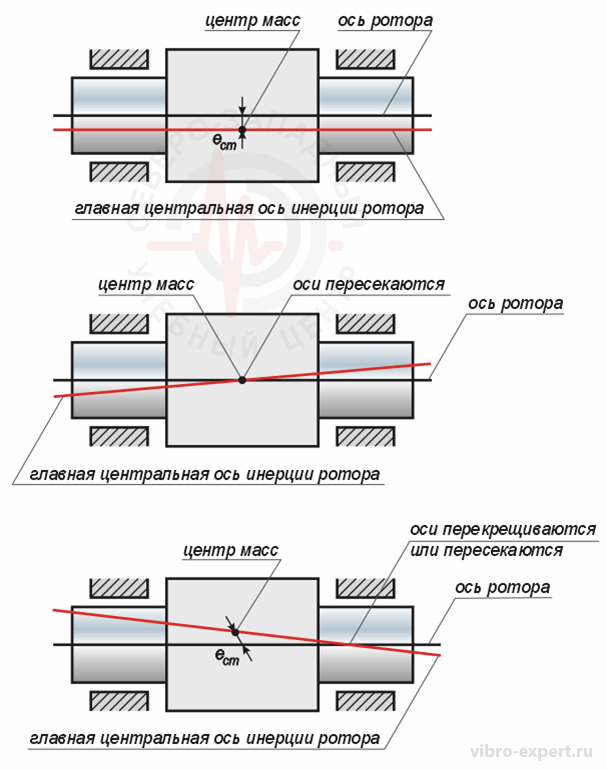
Рис.3. Статическая, моментная и динамическая неуравновешенность ротора. Если неуравновешенность - только статическая, оси вращения и инерции параллельны. Если неуравновешенность только моментная, оси пересекаются. При смешанной неуравновешенности центр масс ротора смещается в двух направлениях - в перпендикулярной к оси вращения плоскости и вдоль оси в сторону одной из опор.
При вращении неуравновешенного ротора под действием центробежной силы может возникать дополнительное (к величине эксцентриситета е) смещение центра масс ротора относительно оси его вращения из-за прогиба ротора (гибкий ротор) или деформации опор вращения (упругие опоры), рис 4. С ростом скорости вращения ротора смещение растет, растет и действующая на ротор центробежная сила. Рост смещения происходит вплоть до совпадения скорости вращения с частотой резонанса ротора в опорах. Если дополнительное смещение центра масс из-за прогиба ротора при вращении на резонансной частоте больше деформации опор, скорость вращения ротора называется критической скоростью вращения ротора, если деформация опор превышает прогиб ротора – критической частотой вращения жесткого ротора.
При дальнейшем росте скорости вращения ротора фаза дополнительного смещения изменяется на противоположную, уменьшая суммарный эксцентриситет ротора, т.е. происходит автобалансировка ротора. При жестких опорах вращения центр масс смещается в сторону оси вращения, а максимальная деформация гибкого ротора стремится к величине начального эксцентриситета. При упругих опорах и жестком роторе ось инерции стремится к совмещению с осью вращения, а вал ротора испытывает биения относительно оси вращения в плоскостях опор вращения, амплитуды и фазы которых определяются начальным эксцентриситетом ротора.
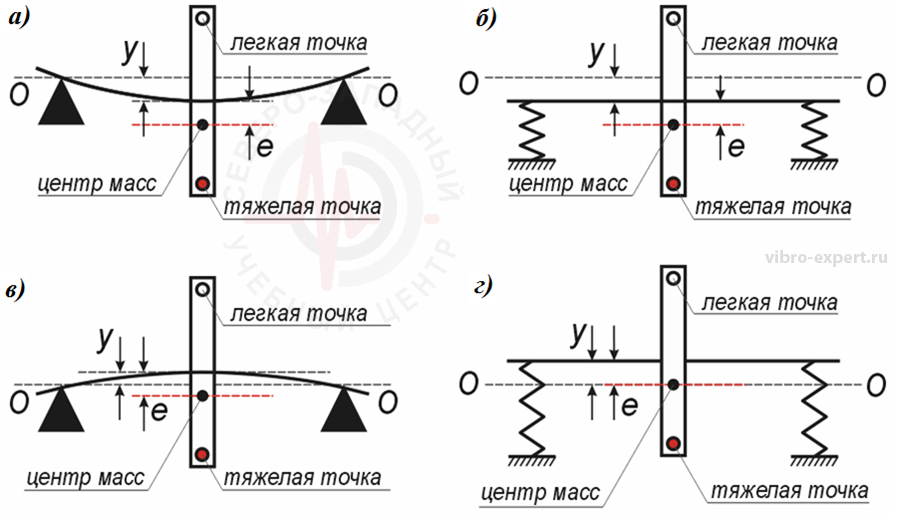
Рис.4. Деформация ротора (а) и опор вращения (б) под действием центробежной силы, растущей с увеличением скорости вращения, и последующей автобалансировкой ротора (в) и (г).
По результатам измерения биений вала (опор вращения) в режиме автобалансировки жесткого ротора в упругих опорах вращения можно определить все необходимые характеристики компенсирующих масс для каждой из плоскостей коррекции. После установки масс оси вращения и инерции вращающегося вала совмещаются, и биения вала прекращаются. Именно биения вала в упругих опорах измеряются в простейших балансировочных устройствах при вращении балансируемой детали на частотах выше резонанса ротора в опорах.
Балансировка жесткого ротора, вращающегося как в жестких опорах, так и в упругих опорах (балансировка на зарезонансных станках) – несложная задача. Для ее решения при стабильной скорости вращения ротора необходимо измерить либо центробежную силу, действующую на каждую из жестких опор вращения, либо бой вала в каждой опоре, либо вибрацию невращающихся частей каждой из упругих опор в плоскости, перпендикулярной оси вращения. При жестких опорах вращения обычно измеряется амплитуда и фаза (относительно выбранной метки на роторе) центробежной силы в каждой опоре. Поскольку реальные опоры вращения не бывают абсолютно жесткими, часто на практике проводят измерения не центробежных сил, а вибрации либо опор вращения, либо других контрольных точек агрегата (балансировочного станка). При этом в зависимости от возможностей используемых средств анализа вибрации в контрольных точках может измеряться виброперемещение, виброскорость или виброускорение на частоте вращения ротора.
Обычно измерения вибрации (центробежной силы) проводятся в три этапа – сначала измеряется исходная вибрация опор вращения, затем вибрация после установки пробных масс (два пробных пуска ротора с установкой масс последовательно по одной в каждую плоскость или по паре, симметричной и кососимметричной - в обе плоскости). Измерения проводятся при идентичных частотах вращения агрегата (балансировочного станка), по этим измерениям определяется матрица комплексных коэффициентов влияния единичной массы в каждой плоскости коррекции на центробежную силу (вибрацию) в каждой контрольной точке и рассчитываются компенсирующие массы для каждой из двух плоскостей коррекции. После установки корректирующих масс проводится заключительное контрольное измерение центробежной силы (вибрации) на той же скорости вращения для оценки остаточного дисбаланса ротора. Если ротор балансируют не впервые или балансируют группу одинаковых роторов и известны (по балансировке первого ротора из группы) коэффициенты влияния единичной массы в каждой из плоскостей коррекции данного ротора на измеряемый параметр в каждой контрольной точке данного агрегата (станка), пробные пуски для повторной балансировки или балансировки следующих роторов не производятся. А расчет компенсирующих масс проводится по исходным измерениям вибрации и известной матрице коэффициентов влияния.
Одна из основных проблем, от решения которой зависит качество балансировки – выбор величины каждой пробной массы. Если масса мала и изменяет вибрацию (центробежную силу) в наиболее чувствительной точке менее чем на 25% (2дБ при измерениях вибрации в логарифмических единицах), точность определения коэффициентов слишком низка. Если масса велика и изменяет вибрацию в чувствительных точках более 2-3 раз, можно выйти за границы линейной связи дисбаланса с измеряемой вибрацией (центробежной силой) из-за зависимости жесткости опор вращения от их деформации. В обоих случаях для достижения необходимых результатов балансировки могут потребоваться два и более циклов балансировки, что резко увеличит и время балансировки, и затраты на нее. Чтобы избежать этого, необходимо при балансировке на станках использовать пробные массы с величиной, рекомендуемой в документации на станок, а при балансировке на месте – близкой к ранее установленным корректирующим массам при первичной балансировке. Для облегчения последующих балансировок ротора в процессе эксплуатации агрегата рекомендуется, кроме коэффициентов влияния, вести учет параметров используемых масс (величины и угла установки каждой их пробных и корректирующих масс).
Другой влияющей на качество балансировки проблемой является использование плоскостей коррекции с сильным взаимным влиянием друг на друга, когда влияние на вибрацию агрегата массы, установленной в одной из плоскостей коррекции, может практически полностью компенсироваться влиянием массы, установленной в другую плоскость. В результате при расчете компенсирующих масс их величины могут быть многократно завышены, создавая опасность при эксплуатации агрегата. Чаще других такие ситуации возникают при использовании доступных для балансировки на месте плоскостей коррекции на полумуфтах соединяемых роторов. Поиск взаимовлияющих плоскостей коррекции с последующим выбором одной из них – обязательная задача, решаемая в программах балансировки.
Для расчета компенсирующих масс может использоваться два типа программ балансировки. Первая – линейная, рассчитывающая компенсирующие массы для двух плоскостей коррекции по результатам измерения вибрации (силы) в двух точках контроля на одной частоте вращения ротора. Вторая - поисковая, в которой количество плоскостей коррекции и точек контроля вибрации может не совпадать друг с другом, а режимов вращения ротора может быть более одного. Линейные программы балансировки чаще всего используются в составе балансировочных станков, поисковые программы – для балансировки машин на месте эксплуатации.
Балансировочная программа в составе КБМ-4 относится ко второму типу и может быть использована как в составе балансировочного станка, так и для балансировки машин в реальных условиях, в том числе многорежимных машин и машин с непостоянной частотой вращения.
предыдущая 1 2 3 4 5 6 7 8 9 10 11 следующая




